
FIRST Robotics · FRC 2024
Ring Shooter Module
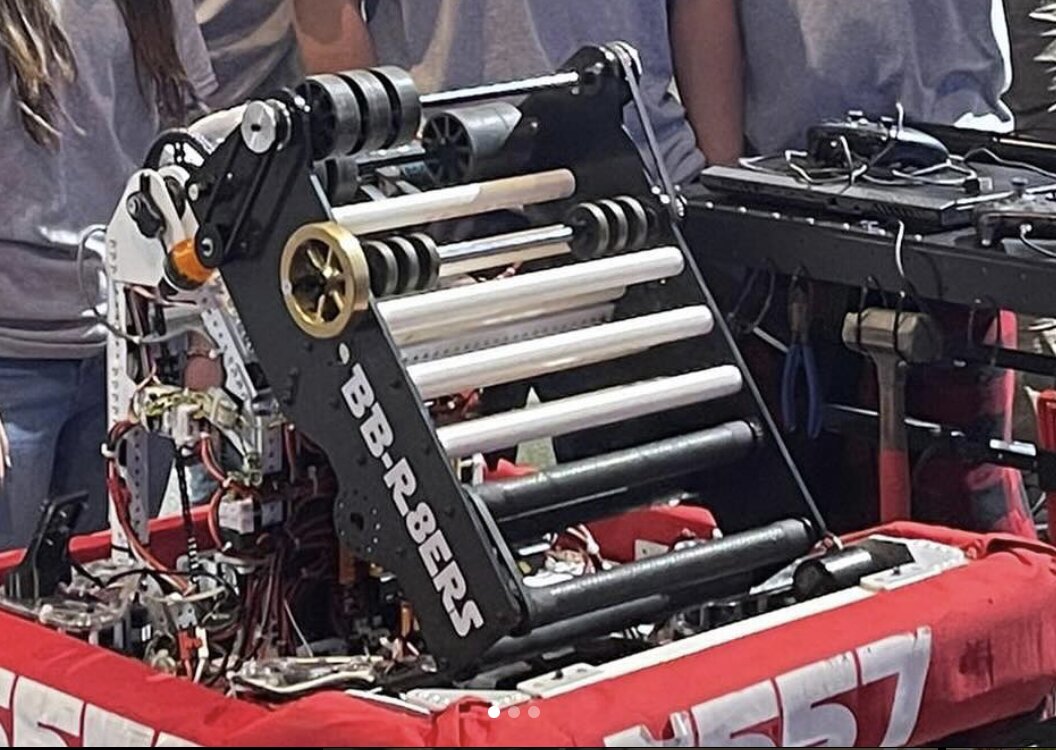
Mechanical design of a dual-stage flywheel ring launcher for FRC 2024, built with Team 5557 (BB-Raiders). The shooter had to fire accurately at full field range while cycling fast enough for multiple shots per match, and unbolt quickly enough for pit service between matches.
Game Context
FRC 2024 (Crescendo) asked teams to launch ring-shaped game pieces across the field into scoring goals. The challenge was building a shooter that could fire accurately at range while maintaining fast cycle times during matches.
What I Built
I helped design the shooter arm assembly: a black delrin arm that holds the roller system, pivots for variable launch angles, and bolts directly onto the robot's main structure. The key design decision was a dual-stage roller system with independent motors. The lower roller pulls a ring from the loader and lifts it into the firing lane, while the upper roller with an integrated flywheel receives the ring and flings it down-field. The flywheel adds rotational inertia so the upper roller maintains angular velocity throughout the full shot, giving consistent range.
An articulation joint with a compact gearbox below the main structure lets the driver tilt the whole shooter between low, mid, and high arcs. The controls team mapped joystick axis to elevation and coded angle presets for button-tap snap-shots.
Design Highlights
Cycle Time
Independent feed & flywheel
Next ring is queued while the previous one is in flight
Range
5× Energy Storage
Flywheel stored ~5× the energy of a bare roller, hitting far-field goals reliably
Driver-Friendly
Joystick + Presets
One joystick axis for elevation, button presets for snap-shots
Pit-Ready
Fast Service
Black arm unbolts as a single unit, motor/roller swap < 5 minutes

My Role
I handled the mechanical design of the shooter arm: CAD modelling, pulley and belt sizing, bearing selection, weight-reduction pocketing, and coordination with the controls team for motor and sensor placement. This was a team project (unlike the robotic arm), which meant working within the constraints of other subsystems and adapting to changes in the robot's overall architecture during build season.
FRC taught me how to design under real constraints: weight limits, size envelopes, budget, and a hard competition deadline. The shooter had to integrate with a robot I didn't fully control, which meant constant communication with the drivetrain and controls teams.